近日,天津大学材料学院教授封伟研发了一种具备自主行动能力和触觉应变的4D打印软体机器人,该机器人在一次打印成型后即具有热致无约束滚动能力,无需任何其他后续加工程序。
该研究成果在《细胞》出版社旗下顶尖期刊《物质》发表。
传统制造方法限制了软体机器人“智能”
软体机器人是一种新型柔韧机器人,他们能够适应不同的非结构化环境,更好、更安全地与人类进行交互。同传统机器人相比,它们灵活、适应性强,危险性更小。但是目前,软体机器人主要采用手工装配工艺制造。制造方法的局限性导致了生产困难,限制了材料选择范围,并且难以获得复杂的驱动性能,特别是无限制的自主运动和感知能力。
相比之下,3D打印(增材制造技术)可以基于数字模型自动准确地将设计思想转化为复杂零件,从而显著提高生产效率和制造灵活性。
“我们在3D打印的基础上,为软体机器人制造增加‘时间’维度——即4D打印,将智能材料加工成对热刺激具有响应行为的动态结构材料。”封伟介绍,我们希望通过4D打印能获得具有感知能力和适应性的智能软体机器人,而不是仅仅只会变形的致动器。如果软体机器人能具有更丰富的驱动现象,就可以模仿更多动物或人的行为,实现智能化,也就是人工智能。而目前的研究多数都是基于弯曲变形的致动器,这仅仅是初步的刺激响应性能。
4D打印直接获得智能软体机器人
通过4D打印直接获得智能软体机器人是一个巨大的挑战。
封伟团队通过4D打印对液晶弹性体智能材料进行精确加工,直接获得了具有感知能力和适应性的智能软体机器人。“液晶弹性体是一种交联的聚合物网络,可将各向异性的刚性介晶单元连接在聚合物网络中,其特殊的结构将橡胶的弹性和液晶的各向异性有机结合起来,产生特殊的光学和物理特性。”封伟介绍,由于晶体内的原子定向排布导致液晶各个方向上所体现出来的性质都不一样,这就是各向异性。
通过改造基于熔融沉积技术的3D打印机,团队实现了液晶弹性体的精准墨水直写打印技术。在此过程中,刚性介晶单元被直接写入具有可控分子序列的三维结构中。由于介晶排列顺序是通过打印路径设置的,因此不同的排列顺序可以实现不同的刺激响应性能。
封伟团队通过全新的液晶弹性体热驱动现象,得到了一种具备自主行动能力和触觉应变的4D打印软体机器人。该机器人在一次打印成型后即具有热致无约束滚动能力,无需任何其他后续加工程序,制作简单快速,重复性好。
“最让我们惊喜的是这种机器人的自主性,以及在遇到障碍物时的智能仿生行为。机器人的滚动稳定有力,而速度和方向可通过改变形状和尺寸进行调整。”封伟表示。
当放置于160℃的热台上时,4D打印的矩形软体机器人变形为螺旋管状,并在加热板上自动开始滚动。调整大小可以改变机器人的滚动速度。而滚动的方向由螺旋管的曲率方向控制,可以轻松改变。这种管状机器人的整个驱动过程是自动的,无需改变环境因素,完全能在脱离人工控制的情况下完成任务。由于软体机器人显示出一定的黏弹特性和相当大的滚动驱动力,所以即使以一定角度放置在倾斜的加热板上时,依然可以向上滚动。
可装载机器人自重40倍的货物
相比于在日常环境中执行精确和重复性工作,机器人在极端环境中的工作更为不可替代。比在如酷热、寒冷、辐射、深水、真空和其他条件下执行智能和受控任务,对所有类型的机器人来说都是极具挑战性的。而与具有刚性系统的普通金属机器人相比,软体机器人在极端环境中的工作能力更为有限,特别是在极端高温条件下。
目前的软体机器人,特别是由单种材料组成的软体机器人,走向人工智能的道路依旧漫长而艰难。
封伟团队此次研制的4D打印软体机器人,由于螺旋圆筒的曲率方向控制滚动方向的特性使得这种软体机器人具有类似昆虫触角的触觉感知能力,能够探测前方道路上的障碍物,根据障碍物的高低实现翻越或折返,从行为学上体现了一定的智能性。比如当机器人穿越未知的固定长度路径时,将能实现3种场景:在预定时间内穿越意味着滚动路径中不存在障碍物;比预定时间穿越的慢意味着未知路径稍微被阻塞;机器人返回起点意味着未知路径被严重或完全阻塞。
此外货物运输也是无约束软体机器人的一个重要应用。“虽然我们的机器人只能向前和向后移动,但它依然可以用于点对点货物运输。”封伟介绍:“管状机器人的空心圆筒为线形物体提供了装载空间。为了测试管状机器人在非线形物体情况下的运输能力,我们设计了一个类似于地牛的小型牵引装置,整个装置可以在加热板上以恒定速度移动。这表明这种软体机器人可以应用于在极端高温环境中执行货物运输任务。”
通过增加样品长度,软体机器人可显著提高运输能力。如果样品长度增加到米级时,管状机器人的运输能力可能会增加一个数量级,装载货物的最大容量可达机器人重量的40倍。(记者 陈 曦 通讯员 刘延俊)
 今年全国快递业务量已达600亿件,你贡献了多少? 国家邮政局监测数据显示,截至6月24日,今年我国快递业务量已达600亿件
今年全国快递业务量已达600亿件,你贡献了多少? 国家邮政局监测数据显示,截至6月24日,今年我国快递业务量已达600亿件
 首届奥林匹克电竞周开打,是时候重新理解“虚拟体育” 首届奥林匹克电竞周开打,是时候重新理解“虚拟体育”,虚拟体育,是一
首届奥林匹克电竞周开打,是时候重新理解“虚拟体育” 首届奥林匹克电竞周开打,是时候重新理解“虚拟体育”,虚拟体育,是一
 汽车博主发表贬损极狐汽车言论 极狐要求永久删除 近日,北汽极狐公司针对知名汽车博主袁启聪在抖音和微博发布的涉及极狐
汽车博主发表贬损极狐汽车言论 极狐要求永久删除 近日,北汽极狐公司针对知名汽车博主袁启聪在抖音和微博发布的涉及极狐  天天视点!极限 极限有高有低……心理极限极高的人可能身体会先到极限而出问题。身体极
天天视点!极限 极限有高有低……心理极限极高的人可能身体会先到极限而出问题。身体极  世界热推荐:观众齐喊“开空调”!梁静茹沈阳演唱会遭遇尴尬一幕 近期高温预警,再加上演出现场人员爆满,昨天是满场,估计昨天观看演唱
世界热推荐:观众齐喊“开空调”!梁静茹沈阳演唱会遭遇尴尬一幕 近期高温预警,再加上演出现场人员爆满,昨天是满场,估计昨天观看演唱 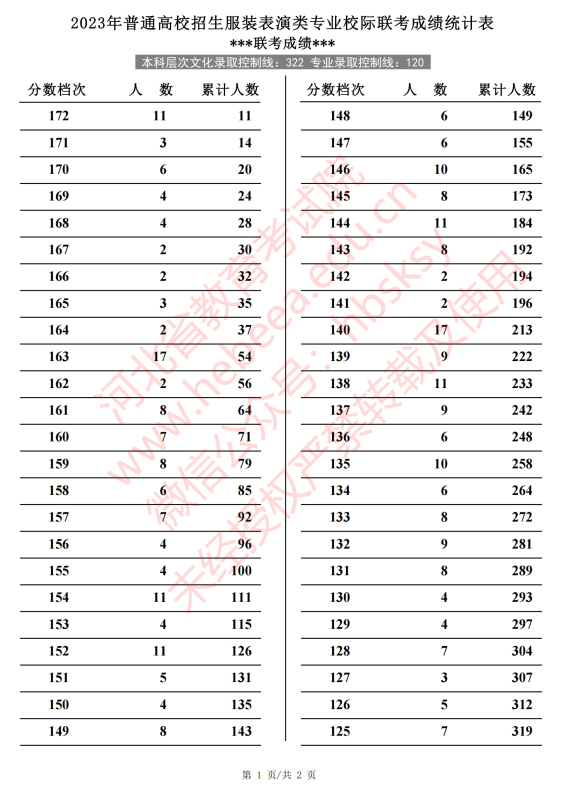 每日快看:2023年河北省普通高校招生服装表演类专业校际联考成绩统计表(专业成绩·综合成绩) 最新高考资讯、高考政策、考前准备、志愿填报、录取分数线等高考时间线
每日快看:2023年河北省普通高校招生服装表演类专业校际联考成绩统计表(专业成绩·综合成绩) 最新高考资讯、高考政策、考前准备、志愿填报、录取分数线等高考时间线  2023年基金从业资格考试《私募股权投资》每日一练0623_基金从业资格考试|即时看 2023年基金从业资格考试《私募股权投资》考试共100题,分为单选题。小
2023年基金从业资格考试《私募股权投资》每日一练0623_基金从业资格考试|即时看 2023年基金从业资格考试《私募股权投资》考试共100题,分为单选题。小




