日本大阪大学一个科研团队研究了控制猫行走的重要神经回路,开发出一款移动行走的机器人,编入了猫的神经和肌肉特性,能够再现猫的稳定行走。研究人员认为,利用这种机器人再现运动,有助于查清动物活动的情况,结合动物的身体机制,还有助于开发出灵活、稳定的步行机器人。
近年来,研究人员逐渐发现,动物的行走运动不是由大脑和脊髓中复杂的神经回路产生的,而只是由简单的反射性神经回路产生。关于猫行走的研究在20世纪后半期取得了进展,但现在因爱护动物等原因,动物实验受到了严格的管理和限制,利用动物活体研究行走机制变得困难。
研究团队开发了模拟动物行走的四足机器人。机器人利用马达和电路在每条腿上分别再现了控制腰部和膝盖移动的四块肌肉。通过计算机设置每块肌肉和每条神经的动作及连接等,使机器人移动。(记者陈超)
 全球观察:端午节期间日均132.1万人次出入境 较去年增长约2.3倍 据国家移民管理局25日消息,2023年端午节期间全国边检机关共查验出入境
全球观察:端午节期间日均132.1万人次出入境 较去年增长约2.3倍 据国家移民管理局25日消息,2023年端午节期间全国边检机关共查验出入境
 汽车博主发表贬损极狐汽车言论 极狐要求永久删除 近日,北汽极狐公司针对知名汽车博主袁启聪在抖音和微博发布的涉及极狐
汽车博主发表贬损极狐汽车言论 极狐要求永久删除 近日,北汽极狐公司针对知名汽车博主袁启聪在抖音和微博发布的涉及极狐  天天视点!极限 极限有高有低……心理极限极高的人可能身体会先到极限而出问题。身体极
天天视点!极限 极限有高有低……心理极限极高的人可能身体会先到极限而出问题。身体极  世界热推荐:观众齐喊“开空调”!梁静茹沈阳演唱会遭遇尴尬一幕 近期高温预警,再加上演出现场人员爆满,昨天是满场,估计昨天观看演唱
世界热推荐:观众齐喊“开空调”!梁静茹沈阳演唱会遭遇尴尬一幕 近期高温预警,再加上演出现场人员爆满,昨天是满场,估计昨天观看演唱 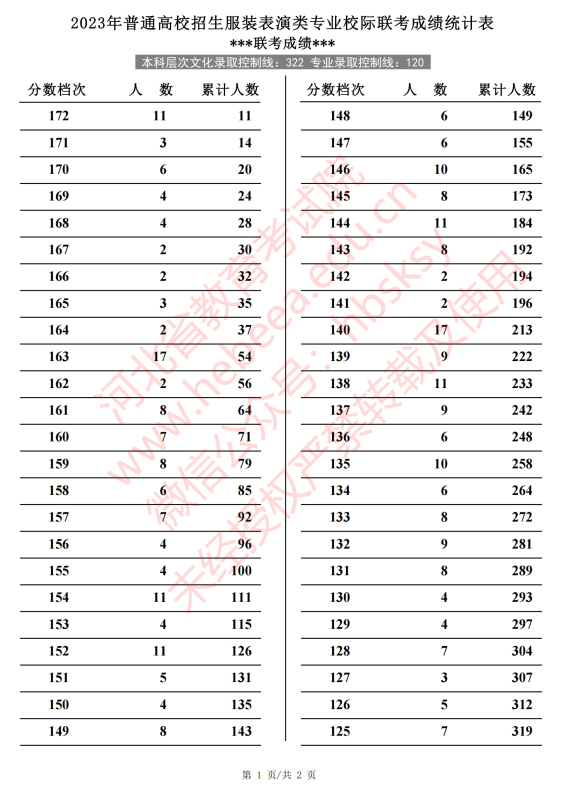 每日快看:2023年河北省普通高校招生服装表演类专业校际联考成绩统计表(专业成绩·综合成绩) 最新高考资讯、高考政策、考前准备、志愿填报、录取分数线等高考时间线
每日快看:2023年河北省普通高校招生服装表演类专业校际联考成绩统计表(专业成绩·综合成绩) 最新高考资讯、高考政策、考前准备、志愿填报、录取分数线等高考时间线  海口江东新区将建香港玉玲珑珠宝产业园 近日,记者从海口江东新区管理局获悉,位于海口江东新区离岸创新创业组
海口江东新区将建香港玉玲珑珠宝产业园 近日,记者从海口江东新区管理局获悉,位于海口江东新区离岸创新创业组





